
 企業の方へ
企業の方へ機械の進化に新たな道筋をつくる 川村 貞夫
立命館大学の川村貞夫教授は、これまでの重厚なロボットのあり方に疑問を持ち、新しい材料、機構、制御による安く、軽く、エネルギー効率の高いロボットを研究している。その基本思想は「生物が持つ運動機能を解析し、その本質的な部分を工学的に再現する」というものだ。既存の産業ロボットとは全く別の方向性の技術を追求する川村氏に、その狙いと目指す世界観を伺った。
産業ロボットはニッチで進化してきた
産業用ロボットは、製造・流通等の現場において人の代わりに作業を行うものとして、数十年にわたって研究と開発が進められてきた。だがそれを活用してきたのは自動車をはじめとする大きく重たい製品や、電子部品のような大量生産する単一規格製品の工場など、産業全体としてみると一部の領域に限られてきた。その理由のひとつに、これらのロボットが、基本的にどれも高い剛性を持つ部材やサーボモーター、センサー等の組み合わせにより、自らの姿勢を精密に制御し、正確な位置に設置された部品等を操作する、という設計になっていることが挙げられる。ロボット自体に加え、それを活用する周辺環境を整備するために非常に高いコストが必要となるため、事業規模の大きな企業しか導入できなかったのだ。
川村氏はこの現状を「生物に例えると、似通った環境のみで進化を続け、繁殖してきたようなもの。ロボットそのものの開発だけでなく、それが使える環境を整備してきたシステムインテグレーターがいてこその普及です」と話す。そして今後はサービス業や農林水産業など、これまでロボットを活用できてこなかった場所で使えるよう、新しい材料、新しい機構、新しい制御技術によりロボットの新しい進化の道筋を作ろうとしている。
「結果で帳尻を合わせる」動作の作り方
川村氏が研究で用いるロボットは、材料にポリエチレンやポリプロピレンの袋を使っていたり、わざと歪みを作ってガタガタ動くようにするなど、通常では考えられないようなものだ。その根底には、有り体に言えば「結果さえ帳尻合わせできれば、動作の過程を精密に制御する必要はない」という考え方がある。通常、重厚な産業用ロボットの動作の正確性を担保するには、ロボット自身の空間上の座標位置と設置角度を正確に定め、関節の角度をセンサーで捉えている。さらに同様に空間位置と角度を固定された2点以上のカメラで操作対象物の位置を決定する。「頭の中だけで3次元空間を作り、目をつぶって部品を捕まえるようなものです」と川村氏は表現する。一方、私たちがテーブルの上にあるペンを取る時には、手とペンとの相対位置を見て大雑把な接近の後に正確な把握を行う。これと同様に、ロボットハンドと対象物の2点間の距離のみに基づくビジュアルフィードバックのしくみを作ったところ、安価な装置でも0.52mmの細管に0.5mmの金属を挿入するような超精密動作を実現できたのだ。
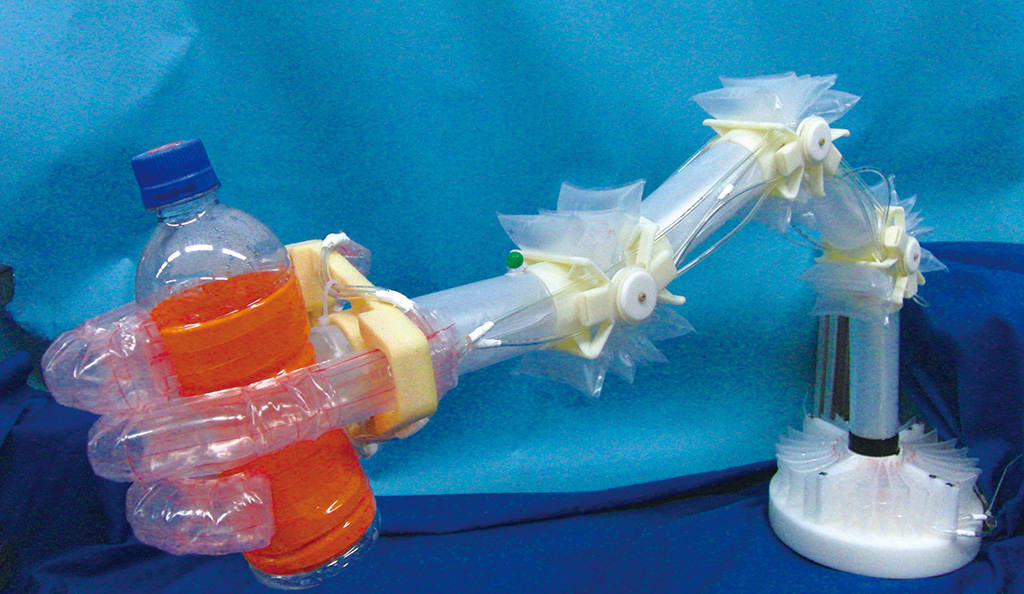
ポリエチレンとプラスチックで作られたロボットアーム
この制御技術があれば、関節からサーボモーターを排したり、剛性の低いプラスチック材料を使ったり、歪みがあったりといった「安い作り方」のロボットでも精密な動きをできるようになる。また低減速比ギアにバネを組み合わせることで柔軟に動く関節を作り、省エネルギーでの首振り運動を実現するなど、新しい動作機構を生み出している。
生物から学ぶ中に、新たな可能性がある
新しいロボットの進化の道筋を考えるにあたって、川村氏は生物の動作をヒントにしている。例えばバネを使った関節制御による首振り運動は、私たちが歩行時に行っている動作と似たものだ。「ただ、ロボットと生物とでは構成材料が違うので、形だけ学んでも意味はありません。あくまでその動作の本質を理解し、有用な機能を工学的に利用するのが重要です」と川村氏は言う。研究室には5.5億年前に起きたとされるカンブリア爆発※の図が飾ってある。現在では似たものすらいないような多様な動物が存在しており、それらがどのように動き、生きていたのか古生物学的にも非常におもしろい時代だ。「今いる生物が最も効率よく動けるわけではありませんからね。想像を広げる、良いヒントになります」。今後国内の労働人口が減少し、多様な産業にロボットが必要となるのは間違いない。その状況に備えて、多様性を生み出すしかけを今行うことが重要なのだ。(文・西山哲史)
※ カンブリア爆発:
古生代カンブリア紀に起きた、今日見られる動物の門(生物の体制)が全て出揃った現象。5億4200万年前から5億3000万年前の化石記録から多様な生物が見つかっているが、実際にはさらに3億年ほど前に爆発的な多様化が始まっていたとされる。